
近年來,農業勞動力老齡化趨勢明顯加劇,招工難、用工貴已成為制約茶產業發展的瓶頸。名優茶的人工采摘消耗占整個茶園管理用工的60%左右,而高檔名優茶芽葉采摘時葉梢細嫩,生長的位置、姿態和密集程度不一,特別在微風和光照變換的非結構化環境下機器采摘實現難度大。因此,研究智能采茶技術對促進我國茶產業發展具有重要意義。

科研人員調試茶葉采摘機器人
一、基于圖像處理的茶葉識別
實現自動化采茶,首先必須解決的是茶樹嫩芽的精準識別。近年來,隨著計算機技術的發展和應用,基于圖像處理的茶葉嫩芽的準確識別成為研究的熱點。
1. 基于顏色空間的傳統圖像處理算法
由于茶葉嫩芽與老葉、樹干存在明顯顏色差異,可利用顏色特征提取出圖像中的嫩芽區域,因此早期的茶葉嫩芽分割研究大多是基于顏色特征的。基于顏色空間的傳統圖像處理算法,其主要過程包括圖像預處理、顏色特征選取與分割等步驟。

茶樹原始圖像
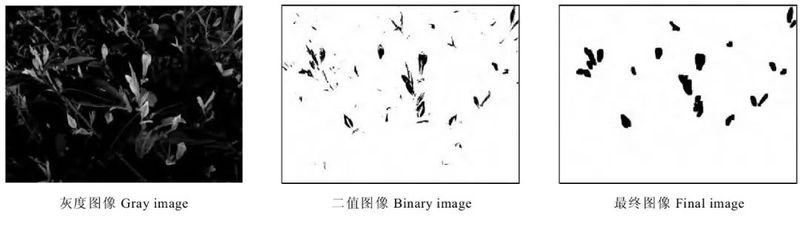
利用色彩因子R-B識別嫩梢
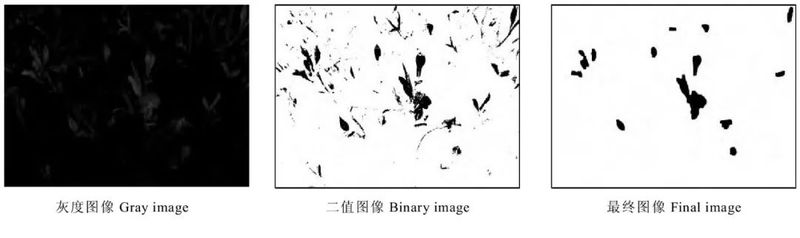
利用色度信息I識別嫩梢
2. 基于傳統機器學習的識別方法
為了進一步解決自然條件下茶葉分割易受老葉、樹枝、土壤等外界環境影響,茶葉互相遮擋與重疊的問題,后續研究中引入了機器學習的方法,通過提取并綜合各種特征樣本數據進行訓練來識別檢測,常見的嫩芽識別方法是基于顏色、紋理、形狀等特征,結合使用諸如K均值聚類法、支持向量機方法、貝葉斯判別方法以及級聯分類器等。基于傳統機器視覺的識別方法仍依賴圖像預處理與數據轉換,前期處理如不合理將會嚴重影響模型的精度。

茶梢原始圖像(a)與機器算法聚類結果(b)
3. 基于深度學習的識別方法
基于深度學習的算法在復雜背景下具有較高的精度,為復雜背景下茶葉嫩芽的智能化采摘設備的研究提供了基礎。可以分為3類,分別是分類算法、目標檢測算法和語義分割算法。基于深度學習的分類算法是對1副圖像進行分類,判別出圖像是否是嫩芽或者識別圖像中的嫩芽的狀態,如芽葉開面狀態、是否處于可采摘的狀態等,該方法具有較好的識別效果,不僅能準確識別茶葉嫩芽,同時還可區分不同嫩芽的狀態,其可滿足自然光照下茶葉嫩芽識別要求,實用性較好。但基于深度學習的方法依賴大樣本,同時檢測效率較低。因此還需要進一步開展茶樹芽葉檢測研究,增加芽葉圖像數量,開發速度更快、精度更高、穩定性更優的算法。
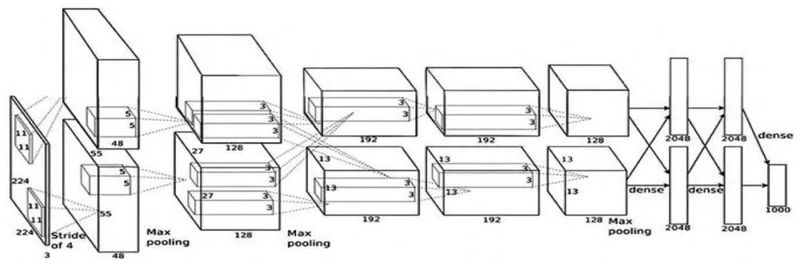
AlexNet模型結構圖,基于該模型可有效識別自然光照下茶葉嫩芽狀態
二、末端采摘執行器
茶葉的采摘對象是芽葉而非果實,傳統的末端采摘執行器難以適用,因此相關的研究人員針對茶葉嫩芽開發了新的末端采摘執行器。如2021年設計出一種可夾提式采摘茶葉嫩梢的末端執行器,通過對其控制實現茶園采摘。試驗結果表明,一芽一葉的漏采率為2.8%、采摘完整率為91%;一芽二葉的漏采率<3%、采摘完整率為94%。現有的茶葉采摘末端執行器大多采用單純的機械式結構,基本沒有誤差補償能力,無法確保采摘成功率和嫩梢完整率。為解決此問題,設計出一種基于負壓導向的名茶采摘末端執行器。這種末端執行器利用負壓以自上而下的方式引導茶芽,從而糾正它們的姿勢和空間位置。試驗結果表明,設計的末端執行器具有偏差容限性能,可以提高拾取成功率。
可夾提式茶葉嫩芽采摘機模型

茶園采摘試驗
三、智能控制系統
智能控制系統的功能主要包括行駛系統的控制和采摘裝置的控制。日本在茶園智能機械行駛系統控制上已有一些研究成果,如日本松元株式會社利用人工智能(AI)和傳感器開發出在無人駕駛的情況下走動收獲茶葉的“無人采茶機”,并已開始銷售。在采摘裝置的控制上,針對傳統往復切割式采收裝置,設計了一種基于機器視覺的乘用式智能采茶機,提出了自動識別茶葉嫩芽和割刀自動調平控制方法,該機可解決現有采茶機無選擇性切割老葉和嫩芽的弊端。目前針對采摘手控制系統所控制的末端采摘執行器個數均為單個,此時的采摘效率仍不高,未來還需針對多個末端采摘執行器、多機械臂協同控制系統進行研發。
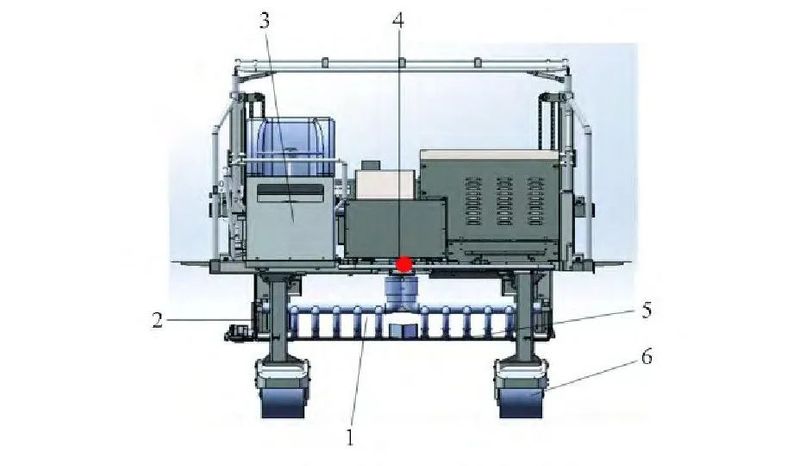
基于機器視覺的乘用式智能采茶機結構圖(1. 割刀水平控制單元;2. 割刀高度控制單元;3. 駕駛室;4. 攝像機;5. 圓弧形割刀;6. 行走機構控制單元)
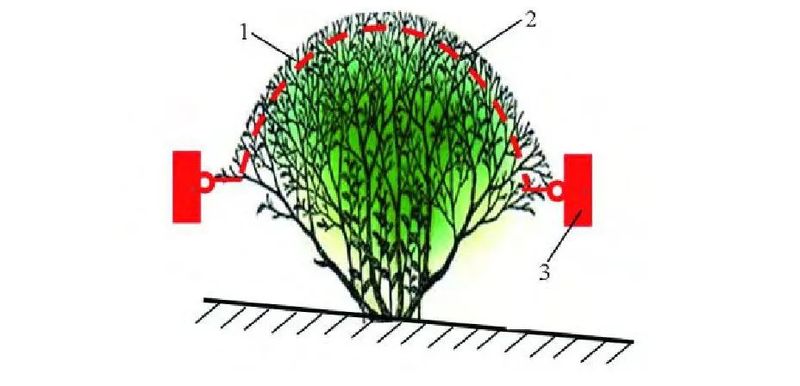
割刀刀刃線與茶隴截面圖
四、存在問題與展望
目前國內外針對高檔名優茶采摘機器的研究剛起步,尚處于概念樣機試驗階段。在實際應用中仍然存在一些挑戰,如當前農業生產中存在著農機農藝結合不緊密的問題、嫩芽識別受光照影響較大、難以分割含與嫩芽顏色相近背景的圖像、葉子間的遮擋和重疊造成識別效果不理想等。相比較傳統的機器學習而言,目前基于深度學習的芽葉識別方法具有良好的應用前景,但需要大量的標記樣本進行訓練,且隨著網絡復雜程度的升高,硬件系統升級也是一個需要解決的問題。隨著機器視覺、人工智能技術的飛速發展,這為智能采茶機的研發提供了良好的基礎。未來的智能采茶機將會有以下發展趨勢。
1. 增加樣本數據,研發識別模型,提高算法效果
目前茶芽識別和定位的難點在于茶葉種類和生長環境的多樣性、遮擋和重疊情況下茶葉嫩芽識別策略、動態干擾,以及算法穩定性和通用性較差。未來應對不同品種、不同茶季、不同等級、不同產區、不同光照下的茶園茶葉圖像進行數據采集,實現茶葉圖像樣本的數據集擴充,豐富樣本的多樣性,建立多品種、多等級茶葉芽葉數據庫,提高算法普適性。
2. 研發具有容差能力的柔性末端采摘執行器
茶葉嫩芽質地較為柔軟,常規末端采摘執行器采摘易對嫩芽造成傷害。同時在茶園非結構化及微風環境下易存在定位誤差和隨機誤差,因此既要在采摘的同時做到不傷害嫩芽,還要采用合適的誤差補償方法,故需要研究具有容差能力的柔性末端采摘執行器。
3. 研發多末端采摘執行器及其高效控制系統
針對茶葉采摘機械臂輕巧、柔順和高速的需求,可通過結構輕量化設計和相應的運動控制算法實現采茶專用末端采摘執行器及其控制系統。同時單個末端采摘執行器效率過低,未來為進一步提高采摘效率,應研發多末端采摘執行器以及高效控制系統,實現多末端采摘執行器任務分配和運動協同規劃,提高茶葉采摘效率。
文字節選自《中國茶葉》2022年第7期,P1-9,《茶葉智能采摘技術研究進展與展望》,作者:李楊,董春旺,陳建能,賈江鳴。
(責任編輯:王翔)
聲明:文章版權歸原作者所有,本文摘編僅作學習交流,非商業用途,所有文章都會注明來源,如有異議,請聯系我們快速處理或刪除,謝謝支持。
(原文章信息:標題:“采茶機器人”是如何工作的?帶你了解茶葉智能采摘技術,作者:中國茶葉,來源:中國茶葉,來源地址:https://www.puercn.com/news/123691/)




